1.7 Egg Jig
Project Context
Egg Jig
This jig was designed as part of my capstone project, built for an industry client. A signed NDA prevents disclosure of the machine's full function. With professor approval, the mechanical subsystems I personally designed are presented here.
For context, the system can be thought of as a 3-metre-long conveyor that carries eggs through a series of operations. The jig is the core carrier unit — it grips each egg individually and travels with it along the line.
My role
Responsible for all mechanical design, from initial concept sketches to final part geometry.
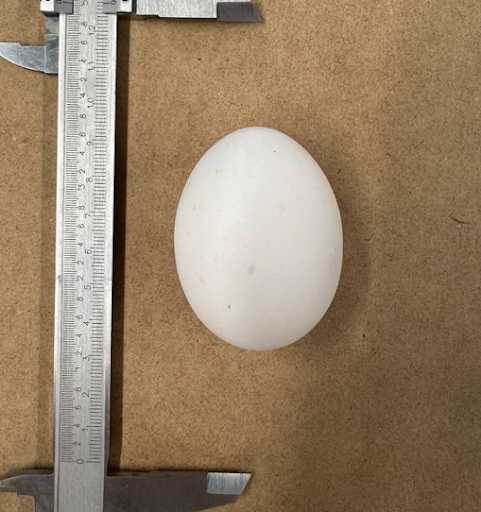
Egg Characterisation
Before defining any geometry, we needed to characterise what we were designing around. A caliper placed beside each egg served as a scale reference. By measuring the known caliper dimension in pixels, I established the mm-per-pixel ratio and used it to measure egg length and width in ImageJ.
01 Scale Reference
Caliper as Scale
Caliper set to a known dimension placed beside each egg. Establishes mm-per-pixel ratio for the photo.
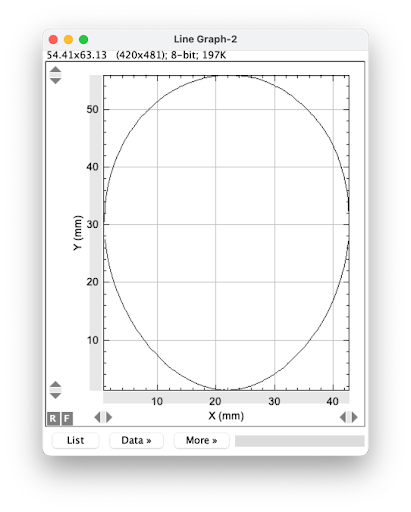
02 Contour Analysis
ImageJ Profile
The egg contour is determined by manipulating the image in the software. Pixel ratio applied to extract length and width.
03 Parameterisation
Jig Geometry
The length and width of the egg is determined. This experiment is repeated for 12 eggs. With these dimensions, jig dimensions are adjusted.
Design Challenges
Challenge 1
Egg Fragility
The jig must hold each egg firmly enough to prevent movement during transport, without generating a clamping force that could crush the shell.
The eggshell failure load was determined analytically and set the upper bound for all jaw and spring design decisions.
Challenge 2
Food Safety
The design must comply with food-grade regulations. This required a hollow bottom panel and a fully open-frame structure so the jig can be cleaned thoroughly between production runs — with no internal cavities where residue could accumulate.
Challenge 3
Passive Actuation
The jaws must open and close automatically as the jig travels the conveyor — with no powered actuator mounted on the jig itself. The mechanism must be entirely passive, reliable, and low-friction over millions of cycles.
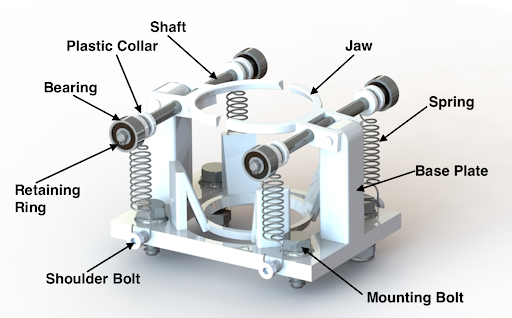
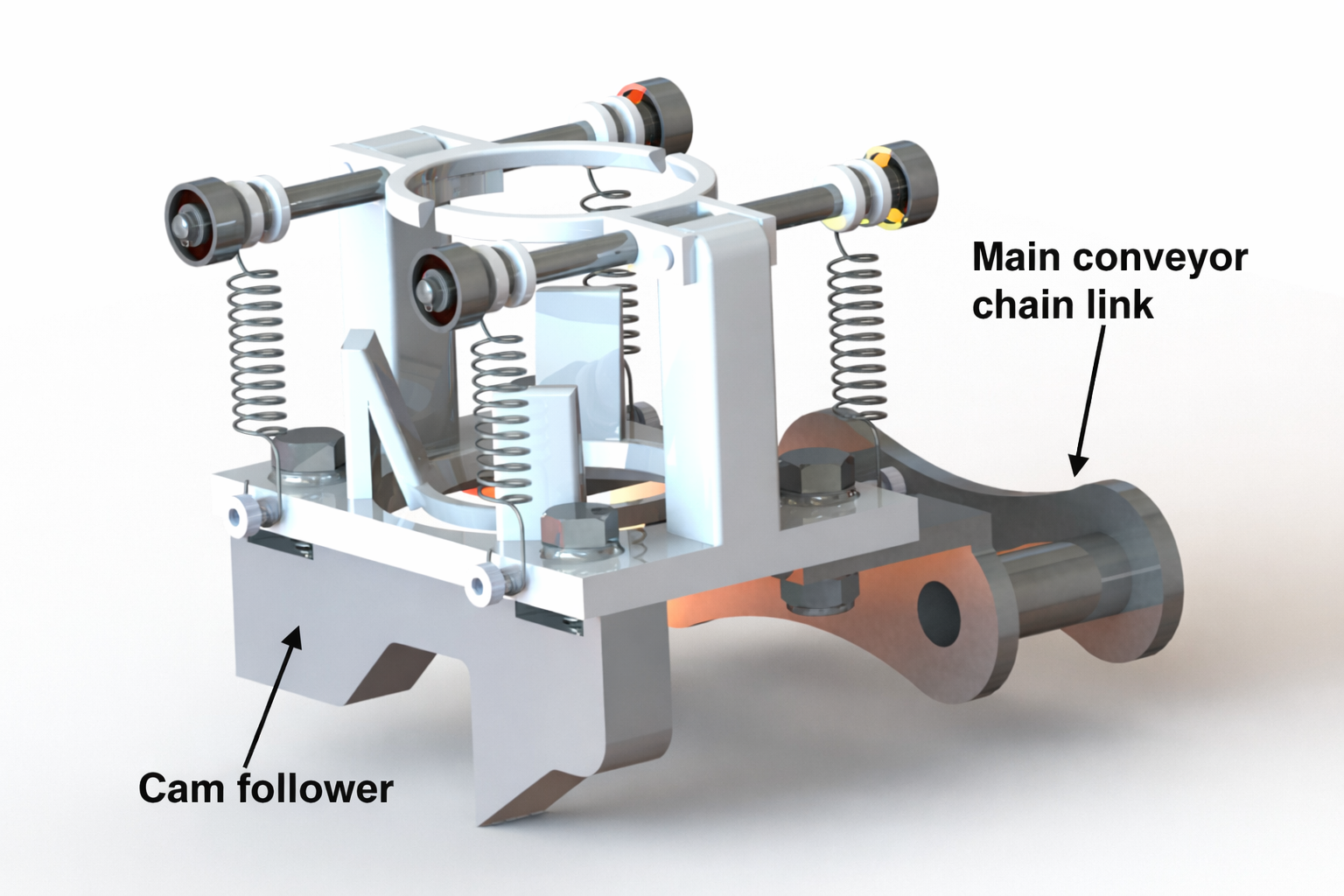
Jig Assembly
How it works
Eggs are delivered to the jig by falling from above. The ring at the bottom is designed to absorb this impact, preventing shell fracture on arrival.
Once clamped, the egg is centred in the lower ring while the jaws maintain a controlled force from both sides. Both jaws default to closed via springs, each anchored to the base plate with a shoulder bolt.
The base has an open-frame, hollow-bottom design to accommodate a downstream operation (undisclosed per NDA) and to allow thorough cleaning between runs.
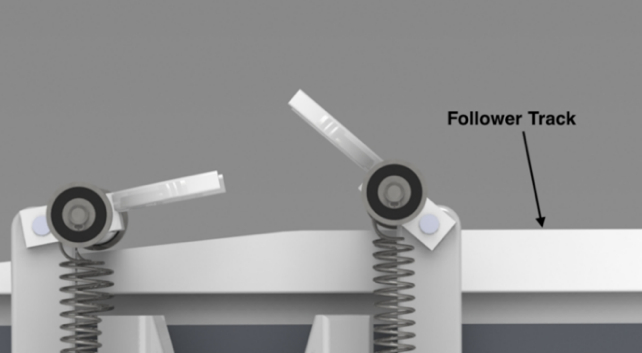
The full assembly mounts to the conveyor chain through four food-safe bolts. Jaw opening is passive, a follower track on the frame contacts bearings on the jaw shafts, acting as cam followers.
Operating States
Default — Closed
Jaws held shut by spring force.
Half Open
As conveyor moves, follower track opens the jaws.
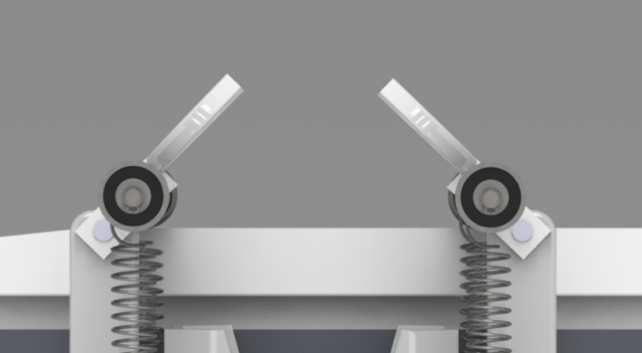
Fully Open
Jaws fully retracted. Egg can be received from the orientation conveyor or released.